- Die Kosten für die Hardware in AVs, insbesondere LiDAR, haben Unternehmen dazu veranlasst, Innovationen in Richtung einer Zukunft zu entwickeln, die nur auf Kameras basiert.
- Während Vorschriften regionale Entscheidungen beeinflussen, ermöglicht die Weiterentwicklung von durchgängigen, transformatorbasierten KI-Modellen reine Sichtwahrnehmungssysteme.
- Die Kosten und Formfaktoren von LiDAR sinken ebenfalls, was LiDAR in zukünftigen Hybridsensoren für autonome Fahrzeuge dennoch relevant machen könnte.
Den vollständigen Bericht finden Sie hier: Neuüberlegungen zu Sensoren für autonome Fahrzeuge: Entwicklung hin zu einer Zukunft, die ausschließlich auf kamerabasierter Sicht basiert?
Mit der Weiterentwicklung der Technologie für autonome Fahrzeuge (AV) wird zunehmend über die Zukunft der Sensorik diskutiert. Sollten sich die AVs der Zukunft ausschließlich auf Kameras verlassen oder werden LiDAR und Radar weiterhin eine wesentliche Rolle spielen?
Historisch gesehen nutzten die meisten autonomen Fahrzeuge einen Multisensor-Ansatz: Sie kombinierten LiDAR, Radar und Kameras, um ihre Umgebung wahrzunehmen und zu interpretieren. Diese Redundanz gewährleistet hohe Zuverlässigkeit, insbesondere in komplexen Fahrumgebungen. Die Kosten und die Komplexität dieser Systeme haben einige Unternehmen jedoch dazu veranlasst, eine rein kamerabasierte, auf künstlicher Intelligenz basierende Strategie zu verfolgen.
Die Kosten sind der Hauptgrund, warum Unternehmen LiDAR abschaffen wollen. LiDAR- Sensoren waren traditionell groß, teuer und stromhungrig. Diese Nachteile haben einige Autohersteller dazu veranlasst, auf reine Kamerasysteme umzusteigen, die günstiger und leichter sind. Tesla und sein CEO Elon Musk sind die Hauptbefürworter der Vision-Only-Theorie. Das Unternehmen argumentiert, dass Autos mit den richtigen neuronalen Netzwerken in der Lage sein sollten, da sich menschliche Fahrer ausschließlich auf ihre Sicht verlassen. Tesla setzt leistungsstarke, durchgängige, transformerbasierte KI-Modelle ein, sodass Kameras allein vollständige Autonomie ermöglichen.
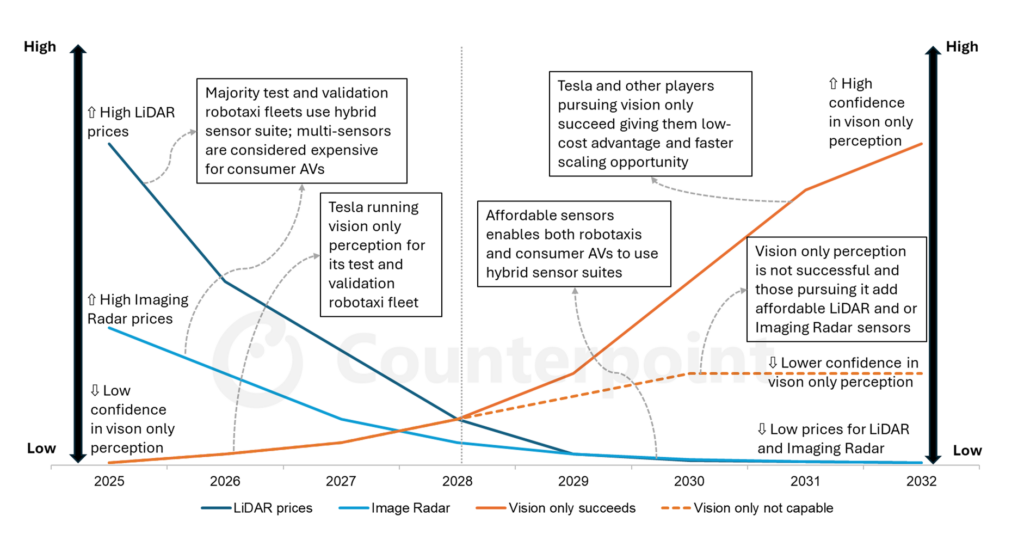
Evolutionspfad der Sensorpreise und der rein visuellen Wahrnehmung
Auch Vorschriften beeinflussen diesen Wandel. In den USA und Europa sind die regulatorischen Rahmenbedingungen tendenziell ergebnisorientiert und sensorunabhängig. So haben Automobilhersteller die Flexibilität, über die Konstruktion ihrer Systeme zu entscheiden, solange diese die Sicherheits- und Leistungsanforderungen erfüllen. Dies ermöglicht es Unternehmen wie Tesla, reine Vision-Systeme zu entwickeln, ohne auf nennenswerten regulatorischen Widerstand zu stoßen.
China hingegen verfolgt einen eher präskriptiven Ansatz. Mit formalisierten LiDAR-Standards und einer breiten Akzeptanz bei lokalen Automobilherstellern scheint das Land multimodale Sensorsysteme zu bevorzugen, die LiDAR als zentrale Komponente beinhalten. Diese Divergenz dürfte die regionalen Strategien prägen.
Reine Sichtsysteme stehen vor erheblichen technischen und sicherheitstechnischen Herausforderungen, die es zu bewältigen gilt. Kamerabasierte Systeme haben bekanntermaßen mit Grenzfällen zu kämpfen, die ungewöhnliche und unvorhersehbare Szenarien wie schlechte Lichtverhältnisse und widrige Wetterbedingungen beinhalten. LiDAR und Radar bieten in solchen Grenzfällen entscheidende Redundanz und erzeugen präzisere 3D-Karten. Tatsächlich wurden die multimodalen Sensor-Suiten bereits zum Training von KI-Modellen für den Einsatz mit kamerabasierten Systemen eingesetzt, um KI-Modelle anhand einer genaueren Grundwahrheit zu validieren.
LiDAR, einst ebenfalls unerschwinglich teuer, wird zunehmend rentabler, da die Anbieter die Kosten drastisch senken. Solid-State-LiDAR-Designs mit kleineren Formfaktoren zeichnen sich zudem durch deutlich niedrigere Produktionskosten aus. In China statten Automobilhersteller bereits Massenfahrzeuge mit LiDAR aus, was teilweise auf die aggressiven Kostensenkungsbemühungen lokaler Hersteller wie Robosense und Hesai zurückzuführen ist.
Die geringeren Kosten von LiDAR dürften bei einigen OEMs zu der Entscheidung führen, es aus Gründen der erhöhten Sicherheit und Redundanz beizubehalten, während andere, wie Tesla, daran arbeiten, LiDAR vollständig zu entfernen. Der Erfolg dieser Strategie hängt allerdings davon ab, wie schnell sich die Sicherheit und Zuverlässigkeit von reinen Kamerasystemen unter realen Bedingungen erweisen kann.
Darüber hinaus versprechen die Fortschritte im Radarbereich, beispielsweise das von Unternehmen wie Mobileye entwickelte 4D-Bildgebungsradar und das Distributed Aperture Radar (DAR) von Zendar, verbesserte Wahrnehmungsfähigkeiten als Ergänzung zu Kameras und zur Verringerung der Abhängigkeit von LiDAR.
Kurz- bis mittelfristig dürften hybride Sensorsysteme mit Kameras, LiDAR und Radar der Standard bleiben, insbesondere bei Robotertaxis und kommerziellen autonomen Fahrzeugen. Diese Systeme bieten mehr Robustheit und tragen dazu bei, dass Fahrzeuge über redundante Wahrnehmungsfunktionen verfügen, was für das Vertrauen der Öffentlichkeit und die behördliche Zulassung von entscheidender Bedeutung ist.
Bei einigen AVs für den Endverbraucherbereich, bei denen Kosten und Skalierbarkeit im Vordergrund stehen, könnte sich das Gleichgewicht im Laufe der Zeit zugunsten von reinen Kamerasystemen verschieben, die die Sicherheitsleistung multimodaler Ansätze erreichen oder übertreffen können. Die geringeren Hardwarekosten könnten zu verlockend sein, um sie zu ignorieren. Dies wäre jedoch nur möglich, wenn die technischen und Validierungshürden für reine Kamerasysteme überwunden werden.
Die Sensorstrategie der AV-Branche steht an einem Wendepunkt. Einerseits beobachten wir einen Trend hin zu reinen Vision-Systemen, der durch KI-Fortschritte und Hardware-Kosteneinsparungen vorangetrieben wird. Andererseits entwickeln sich Radar und LiDAR weiter und werden kleiner, günstiger und praktikabler für den Masseneinsatz. Verschiedene Regionen verfolgen unterschiedliche Wege, und die endgültige Richtung wird wahrscheinlich davon abhängen, wer nachweisen kann, dass sein Ansatz am sichersten, skalierbarsten und kostengünstigsten ist.